2 de diciembre de 2019
L
Los robots van entendiendo el mundo que les rodea
por Pablo Rodríguez Canfranc
2 de diciembre de 2019
por Pablo Rodríguez Canfranc
A pesar de su popularidad actual, la robótica no es un fenómeno nuevo. Los autómatas llevan ya varias décadas instalados en las fábricas, y el uso de algoritmos por las empresas para optimizar procesos o tareas cada vez está más extendido. Lo que sí es cierto es que los últimos años han conocido avances notables en los campos de la robótica, la inteligencia artificial y, dentro de esta, el aprendizaje automático o machine learning. Todo ello nos lleva a pensar que estamos entrando en una nueva era de la historia en la que estas máquinas dotadas de inteligencia van a acaparar gran parte del protagonismo.
Hay varias razones que explican este impresionante salto tecnológico. Por una parte, los algoritmos basados en el aprendizaje automático han progresado sobremanera guiados por el aprendizaje profundo y las técnicas de refuerzo del aprendizaje basadas en redes neuronales.
Además, la capacidad de computación crece de forma exponencial, y permite entrenar modelos cada vez más grandes y complejos. Las unidades de procesado de gráficos, originalmente concebidas para los videojuegos, son ahora utilizadas para la compresión de datos y algoritmos necesaria para el aprendizaje automático, para alcanzar velocidades de computación varias veces superiores que las que permiten los microprocesadores tradicionales.
Por último, cada vez hay mayor disponibilidad de datos para alimentar el aprendizaje automático de las máquinas, gracias a los sensores del internet de las cosas, y a la abundancia de registros gráficos y de sonido.
Y, sin embargo, las máquinas inteligentes siguen presentando limitaciones respecto a nosotros los humanos. A la inteligencia artificial actual no se le da bien el poner el conocimiento en contexto y, especialmente, carece del sentido común que caracteriza a las personas, el que desarrollamos gracias a las enseñanzas que nos ofrece la experiencia.
Los algoritmos funcionan muy bien en temas relacionados con la inteligencia estrecha –por ejemplo, juegos de mesa con reglas muy definidas-, pero se atascan con la inteligencia flexible, la que se necesita para razonar o utilizar el lenguaje, por poner dos ejemplos. En el caso de los robots ocurre algo parecido: hasta ahora han sido extremadamente eficientes en entornos muy estructurados, pero, en cambio, encuentran serios problemas para operar en escenarios desordenados. Otro problema que presentan es la falta de la destreza necesaria para coger todo tipo de objetos, independientemente de su tamaño o forma. Las extremidades robóticas han carecido tradicionalmente de motricidad fina.
En la robótica más básica, la máquina está diseñada para realizar tareas muy específicas en un entorno concreto, generalmente invariable. Si pensamos en robots más avanzados, entonces tenemos que crearlos lo más autónomos posibles y adaptativos a los cambios del medio en el que operan. De esta forma, en función de las tareas que queremos que realicen, el nivel de complejidad varía.
No obstante, poco a poco la robótica va consiguiendo superar sus limitaciones físicas y de aprendizaje. La empresa de Google Alphabet X ha puesto en marcha el proyecto Everyday Robot para crear robots que sean capaces de aprender del mundo que les rodea, de forma que no tengan que recibir códigos cada vez que tiene que ser programados para una nueva tarea.
La densidad de robots en el mundo creció -de acuerdo con Information Technology and Innovation Foundation- del 66 en 2015 al 85 en 2017. Se trata de un indicador que mide el número de robots industriales por cada 10 000 trabajadores. Si analizamos la presencia de autómatas por países, destacan como los más robotizados Corea del Sur, Singapur, Alemania, Japón y Suecia.
Robots por cada 10 000 trabajadores industriales (2017)
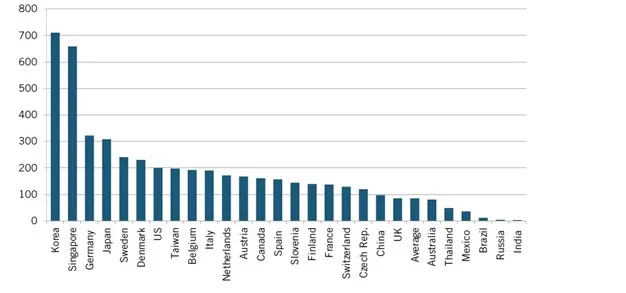
Fuente: Atkinson, R. (2019) “Robotics and the Future of Production and Work”. ITIF
España en este apartado aparece en un puesto medio dentro de los países considerados, el número catorce. De acuerdo con ITIF, que ofrece esta información, existe una mayor propensión a incorporar robots en aquellas economías en las que los salarios son superiores, puesto que el ahorro de costes laborales es mayor. En cambio, en naciones con unos salarios medios más reducidos, el mantenimiento de fuerza de trabajo humana puede seguir siendo rentable para las empresas.
En naciones con unos salarios medios más reducidos el mantenimiento de fuerza de trabajo humana puede seguir siendo rentable para las empresas
Sin embargo, el salario relativo de los países no es el único factor que explica por qué unos tienen más robots que otros. La especialización productiva cuenta y mucho en este sentido, siendo el sector del automóvil el más propenso a incorporar máquinas inteligentes en sus procesos de producción. Y, aun así, hay muchas naciones con una industria automovilística fuerte que no ocupan puestos destacados en lo que a robótica se refiere, como Brasil, Canadá, Francia, Italia, Rusia y la misma España.
En el pasado los robots eran situados en la cadena de producción para realizar tareas muy sencillas y repetitivas. Pero eso está cambiando. Los avances en el diseño y en la programación de los autómatas les permiten realizar cada vez tareas más complejas, que requieren de una destreza superior.
En los años ochenta del siglo pasado el experto del Robotics Institute de la Carnegie Mellon University Hans Peter Moravec formuló un principio según el cual resulta muy complejo programar en un robot nuestra capacidad de percepción y nuestras habilidades sensomotoras, y, en cualquier caso, afirmaba, es mucho más difícil que reproducir las habilidades intelectuales de los humanos. En suma, es más sencillo crear algoritmos de inteligencia artificial para llevar a cabo tareas basadas en el cálculo y las matemáticas, que robots inteligentes que sean capaces de interactuar físicamente con el entorno.
Los fabricantes de robots suelen vender el término “destreza” como una ventaja competitiva del producto. Sin embargo, es complicado establecer un nivel de destreza estándar –incluso los propios expertos suelen manejar distintas definiciones de este concepto- y, resulta quizá más adecuado, fijarse en las tareas específicas que debe realizar la máquina a la hora de establecer sus habilidades.
De esta forma, de cara a determinar el nivel de destreza que necesita un robot para manipular objetos, hay que tomar en consideración cuestiones como las siguientes:
La complejidad que requiere preparar a un sistema inteligente para realizar determinadas acciones físicas podría justificar que las ocupaciones relacionadas con ellas sigan siendo desempeñadas por trabajadores humanos. Sin embargo, todo esto está cambiando y, poco a poco, se podría estar ampliando el espectro de tareas que puede desempeñar un robot.
Por una parte, la utilización de polímeros en la fabricación de extremidades robóticas, que pueden expandirse y aplicar la medida precisa de presión a los objetos, permite que las nuevas generaciones agarren y levanten objetos que sus predecesores no podían. Además, la inteligencia artificial permite a los autómatas procesar y analizar la información del entorno que reciben a través de sensores y cámaras. Pueden aprender de sus errores y mejorar su ejecución.
La inteligencia artificial permite a los autómatas procesar y analizar la información del entorno que reciben a través de sensores y cámaras
La empresa Boston Dynamics es un buen ejemplo del salto cualitativo que está realizando la ciencia robótica. Sus modelos cada vez se desenvuelven mejor en entornos desestructurados, como pueden ser la superación de obstáculos y desigualdades del terreno. Un ejemplo de ellos es el “ciberperro” Spot, el primero de sus desarrollos que sale a la venta, que es capaz de moverse a una velocidad de 1,6 metros por segundo, y desplazarse por lugares complicados en superficies de todo tipo. Además, si se cae o vuelca es capaz de levantarse por sí mismo, sin ayuda.
La empresa de Google Alphabet está trabajando, dentro del laboratorio The Moonshot Factory, en la iniciativa The Everyday Robot Project, que pretende desarrollar un robot capaz de aprender y de desenvolverse en entornos desestructurados. Como muestra el siguiente gráfico, que procede de la web de la empresa, frente a la robótica industrial –centrada en la realización de tareas especializadas en entornos estructurados-, el objetivo es que sus máquinas puedan trabajar en entornos no estructurados y, además, aprender tareas del día a día.
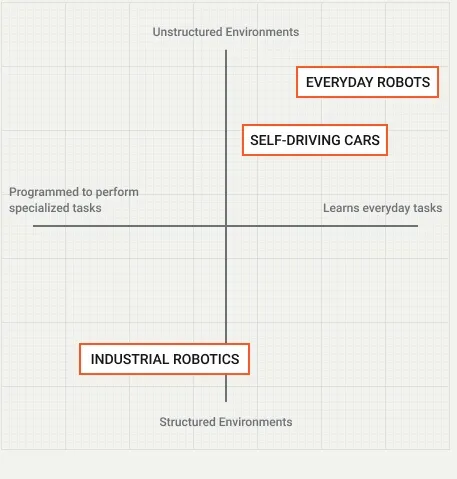
Fuente: The Everyday Robot Project. Disponible en: https://x.company/projects/everyday-robots
Los robots que persigue este proyecto están pensados para operar con seguridad en entornos humanos, es decir, en aquellos en los que las cosas cambian de lugar, donde existen obstáculos y en los que las personas pueden aparecer inesperadamente. Para ello, la máquina debe poder comprender el espacio en el que trabaja e ir adaptándose a él a través de la experiencia.
The Everyday Robot Project pretende desarrollar un robot capaz de aprender y de desenvolverse en entornos desestructurados
El aprendizaje automático es un factor clave para conseguir que estas máquinas lleguen a entender su entorno. Este puede proceder de demostraciones realizadas por los humanos, de la experiencia adquirida por otros robots e, incluso, de simulaciones realizadas en entornos cloud.
La investigación llevada a cabo en las dependencias de Alphabet se basan en tres pilares: percepción, manipulación y navegación. La percepción a través de cámaras en la cabeza del autómata, que recogen información para que sea asimilada por el machine learning, el sistema de inteligencia artificial que incorpora el sistema. Manipulación de todo tipo de objetos, gracias a una destreza muy fina. Finalmente, navegación, pues el robot utiliza los datos que recogen sus sensores para poder entender lo que “ve”, lo que “oye”, y el lugar que ocupa en el mundo, de forma que pueda realizar tareas útiles entre las personas de forma segura.
Álvarez, R. (2019) “Boston Dynamics pone a la venta a ‘Spot’, su perro-robot, mientras que ‘Atlas’ aprende nuevas e impresionantes rutinas de gimnasia” en Xataca. Disponible en: https://www.xataka.com/robotica-e-ia/boston-dynamics-pone-a-venta-a-spot-su-perro-robot-atlas-aprende-nuevas-e-impresiones-rutinas-gimnasia
Atkinson, R. (2019) “Robotics and the Future of Production and Work”. ITIF
Bright Hub Engineering. “Robotics: Scope and Limitations of Robots – What robots can do and they cannot do”. Disponible en: https://www.brighthubengineering.com/robotics/26215-robotics-scope-and-limitations-of-robots/
Mckinsey Global Institute (2017) “Jobs lost, jobs gained: workforce transitions in a time of automation”. Disponible en: https://www.mckinsey.com/~/media/mckinsey/featured%20insights/future%20of%20organizations/what%20the%20future%20of%20work%20will%20mean%20for%20jobs%20skills%20and%20wages/mgi-jobs-lost-jobs-gained-report-december-6-2017.ashx
RB (2019) “How Improved Robot Dexterity Will Help Your Business”. Disponible en: https://www.roboticsbusinessreview.com/news/how-improved-robot-dexterity-will-help-your-business/

Economista especializado en el estudio del impacto de la tecnología en la sociedad. Actualmente trabaja en el área de estudios y publicaciones de Fundación Telefónica.
Ver todos los artículosEconomista especializado en el estudio del impacto de la tecnología en la sociedad. Actualmente trabaja en el área de estudios y publicaciones de Fundación Telefónica.
Ver todos los artículos

